首頁
關於我們
産品中心
解決方案
新聞中心
在線招聘
聯系我們
首頁
關於我們
公司簡介
産品中心
費斯托
傳感器
安全産品
繼電器
開關
控制設備
解決方案
歐姆龍應用案例
費斯托應用方案
新聞中心
公司新聞
行業動态
在線招聘
招聘信息
聯系我們
聯系方式
留言中心
歐姆龍應用案例
歐姆龍應用案例
費斯托應用方案
解決方案
Solution
歐姆龍應用案例
費斯托應用方案
您的位置:
首頁
>
解決方案
>
歐姆龍應用案例
>
歐姆龍應用案例
五軸點膠機的應用案例
五軸點膠機的應用案例
通過五軸點膠,實現更高的
點膠精度,更靈活的點膠角度
生産性提高
電子
加工
高速高精度加工
工藝介紹
現代社會智能設備的進化日新月異,就像公衆的生活品質一樣,人們不再隻追求功能上的滿足,而是越發渴望個性化。
愈發複雜的形狀意味著,對點膠設備提出更高的要求,需要應對更高的點膠精度!更靈活的點膠角度!
首先從點膠軌迹上,從傳統的直線插補、圓形插補、曲線插補,全然進化爲空間圓弧插補、空間橢圓插補、空間漸開線插補等。
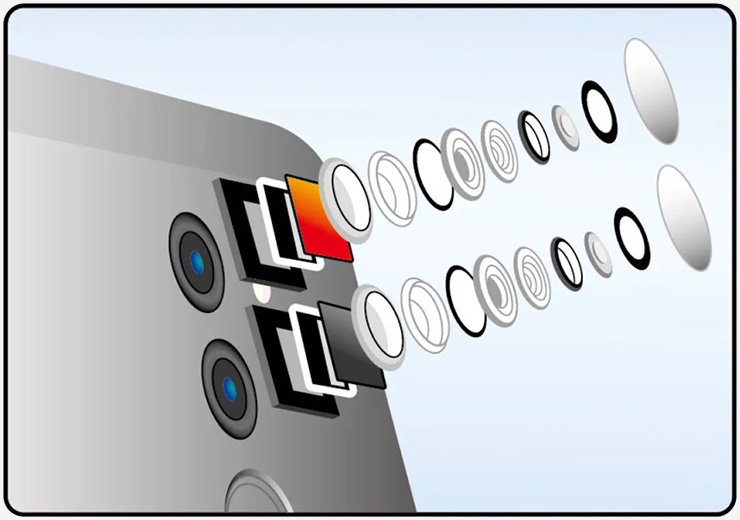
第二,從産品工藝上,如今電子元器件向精細化發展,尺寸越來越緊湊,結構越來越複雜,原本簡單的二維平面加工已無法滿足。
第三,從點膠精度上來看,原本膠體線不小於1mm,點膠精度在0.1mm以内就足夠瞭,而如今膠體線變細( 0.2mm以内),點膠精度提升(點膠誤差0.02mm内)。
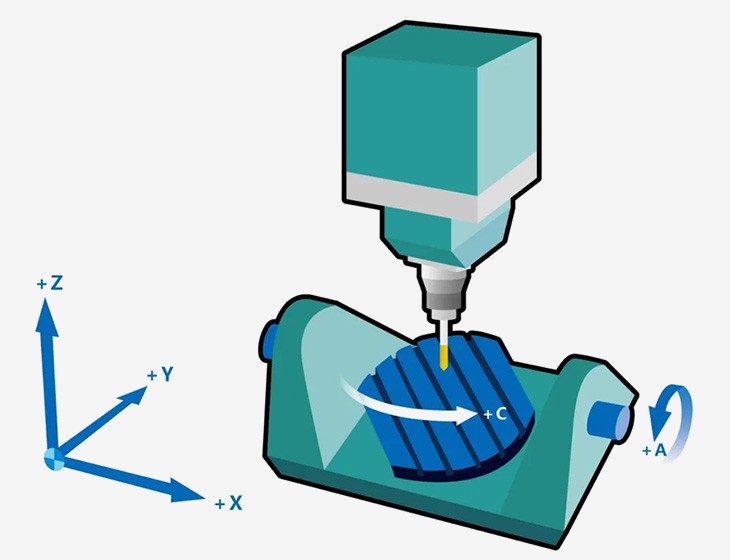
最後,由於點膠工藝需求的提升,促生瞭點膠設備結構的進化(三軸→五軸)
▲ 側面邊框點膠
▲ 攝像頭模組點膠
▲ 手機TP點膠
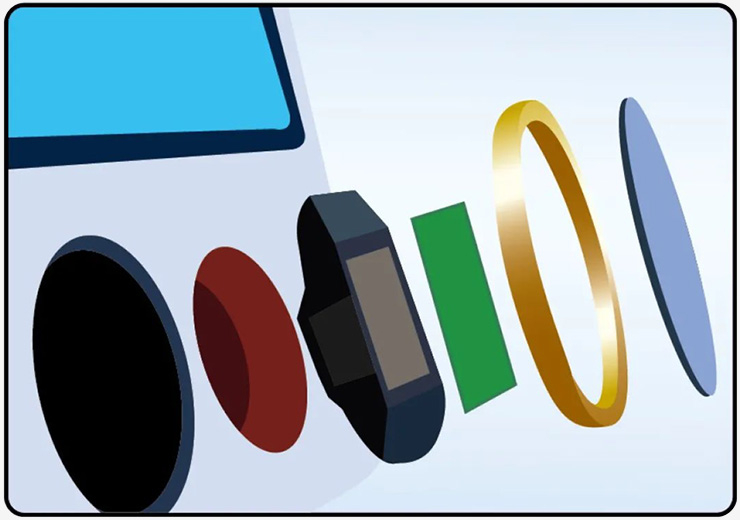
▲ 指紋模組點膠
下圖中展示的,即爲點(diǎn)膠設備(bèi)結構進化後的五軸點(diǎn)膠機:
課題
1、平台精度不足
平台精度影響著後續一切的工序精度,校準得到一個較好的平台精度十分重要。
2、塗膠軌迹不符合預期
即使平台标定精度足夠高,在塗膠時仍會出現軌迹不符合預期的情況。
特别是在旋轉軸旋轉時噴塗圓弧軌迹處(chù)特别明顯,容易出現斷(duàn)膠、堆膠等情況。
解決方案
1、平台精度校準
使用雷尼紹标準球,通過在平台不同姿态下搜索标準球最高點的數據和當前各軸位置來拟合並計算出平台的參數如垂直度、向量、原點中心。
平台标定時使用瞭(le)自己開發制作的GUI操作界面,方便作業人員操作。同時,GUI也能把标定完的參(cān)數結果導入到PMAC控制器。
2、坐标系統一
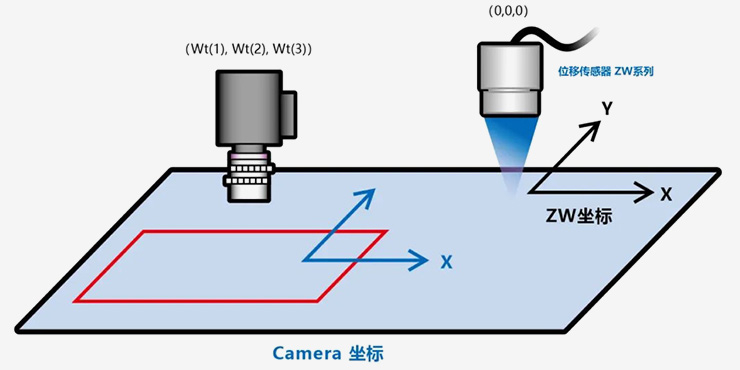
由於(yú)标定使用位移傳感器 ZW系列(以下簡稱(chēng)“ZW”)作爲基準,所以标定完的結果是以ZW焦距位置爲WCS原點的。要統一坐标系,就要統一相機焦距中心和ZW焦距之間的關系以及統一膠閥和ZW焦距之間的關系。
因此,我們通過示教ZW測實際點膠來得到偏移參數,再通過點膠和相機拍照得到偏移參數。最後由上位修改坐标系偏移達到切換坐标系的功能。
3、優化塗膠效果
首先,我們通過優化伺服響應,使命令位置和實際位置的延時<20ms,跟随誤差小於0.1mm。
如果在高速運動下,伺服精度仍難以滿足要求的話,可以嘗(cháng)試調整塗膠工藝參(cān)數,例如:塗直線軌迹時,旋轉軸也同時旋轉;塗膠圓弧時降低塗膠速度,增大加速時間;塗膠圓弧時,降低膠閥噴膠頻率等
控制系統
原本手動調整角度測(cè)量不準確(què),不能滿足對角度精度要求高的工藝動作。如今,升級爲五軸聯動算法,再加之平台精度标定,可實現更高精度的塗膠。
實現價值
1、塗膠速度:100mm/s
2、平台精度:0.02mm
3、XYZ軸垂直度測量與補償精度:0.01°
【經營層】
■ 跟随當前點膠技術的發展,應對複雜的點膠要求,通過五軸點膠,實現更高的點膠精度,更靈活的點膠角度。
■ 五軸點膠技術的運用,使設備性能得到飛躍,競争力UP。
【管理層】
■ 可編程多軸運動控制器 CK3M可直連上位系統,實時監控塗膠狀态,更好的發現課題,對生産流程進行改善。
■ 三軸塗膠容易出現斷膠、堆膠等,而現在的五軸塗膠,精度大幅提升,可減少原本不必要的物料浪費,COST DOWN。
【工程師層】
■ 原本手動/半自動調整平台翻轉/旋轉角度,需重新計算各點膠坐标做軌迹規劃,現在隻需知道平台水平狀态下的軌迹,旋轉翻轉角度和變化後的軌迹靠算法自動計算。
3個(gè)“ I ”掀起制造革新
公司地址:佛山市南海區桂城街道港口路23号宜安科創(chuàng)園1棟(dòng)8樓
備案号:
粵ICP備2022045911号